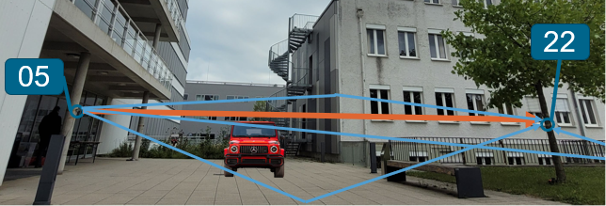
Joint communication & sensing (JCS) enables the reuse of communication technology to detect passive objects by their influence on radio frequency (RF) wave propagation. Typically, the detection is done in a two-dimensional setup, with co-planar transmitter, receiver, and passive objects. In this paper, we generalize the sensing problem to the third dimension and describe a measurement campaign where 14 ultra-wideband (UWB) sensing nodes were placed in an urban canyon-like environment. In our first results, we show that we can localize a vehicle in three dimensions with decimeter-level accuracy by processing its direct reflections received at five UWB nodes.