Modeling Inter-Vehicle Occlusion Scenarios in Multi-Camera Traffic Surveillance Systems
Abstract:
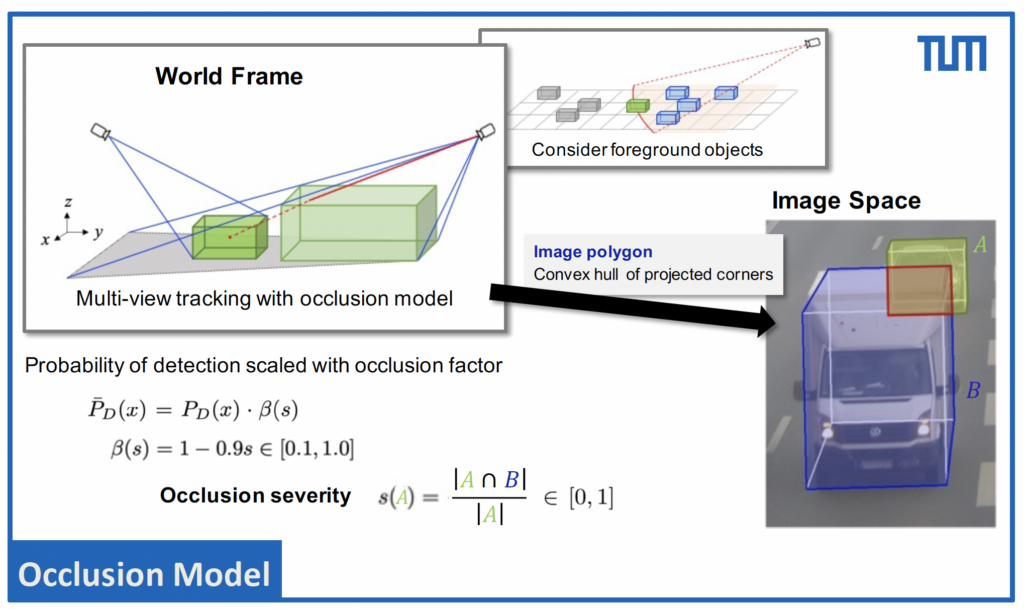
In this paper, we present a novel design for a multi-camera tracking system with occlusion-handling capabilities and its application to a highway traffic surveillance system. The fundamental concept follows the tracking-by-detection principle with monocular detectors and an LMB tracker for tracking the objects in the world frame. All data from the multi-view setup is combined into one consistent representation of the real-time traffic situation. In order to assess the inter-target occlusion scenarios in 3D, the vehicles are modeled as cuboids and their extents are estimated from the bounding boxes provided by the detectors. We re-transform the 3D occlusion estimation problem into the 2D camera space and present two methods for quantifying the occlusion state of the objects. Moreover, we propose a modification to the computation of the existence probability of undetected and occluded targets. Based on this, the tracking system is extended by an occlusion-aware detection model. We evaluate our occlusion-handling approach on a real-world traffic dataset from the Providentia++ project and show an improved tracking performance. We find that the number of misdetected targets is reduced and more track identities are preserved.